Индивидуальный проект "Город без опасности"

Индивидуальный исследовательский проект по робототехнике "Город без опасности" содержит рассуждение о проблеме бездомных собак и их массового уничтожения. Нельзя допускать роста количества беспризорных животных, поскольку помимо прямой их опасности для человека, существует риск переноса ими опасных заболеваний. Тем не менее решать эту проблему необходимо гуманно.
Подробнее о проекте:
Творческая работа учащегося 5 класса о создании из лего робота-помощника для отлова бездомных животных направлена на получение школьником общего представления о конструировании и программировании, а также выполнение самостоятельной практической работы по созданию модели робота и написание программы для управления ним.
Готовая творческая работа по робототехнике на тему "Город без опасности" демонстрирует этапы работы автора над сборкой модели робота-помощника. Конструирование было осуществлено с использованием конструктора лего, также была написана программа для управления роботом. Все этапы работы проиллюстрированы автором. Автор проекта предполагает, что создание такого робота, поможет гуманным способом производить отлов бродячих собак и уменьшить их количество на улицах населенных пунктов, а значит, сделать жизнь людей более безопасной.
Оглавление
Введение
1. Проведение анкетирования.
2. Идея создания робота.
3. Создание робота-помощника.
Заключение
Список литературы
Приложения
Введение
Бродячие собаки есть практически в каждом городе в нашей стране. А это не десятки и не сотни, а тысячи животных. Реакция людей при виде бродячих собак разная. Большинство горожан их вид не радует. Многие относятся к бродячим собакам равнодушно. А кто-то жалеет и подкармливает. Автор убежден, что создание действующей модели робота по отлову бродячих собак является гуманным и инновационным способом уменьшения их численности на улицах.
С каждым годом бродячих собак становится все больше и больше – это серьезная проблема. Во-первых, они могут быть агрессивными. А в стаях они становятся очень опасными. Они нападают на прохожих и детей, причиняя тяжелые травмы и увечья. От бродячих собак страдают до 500 тыс. людей в год! Это огромная цифра! Кроме того, не стоит забывать и о случаях гибели людей от укусов и нападения бродячих собак! По неофициальным данным, это от 30 до 50 человек в России в год!
Во-вторых, бродячие собаки могут заразить человека тяжелыми инфекционными болезнями. Из всех животных собака теснее всего связана с человеком. Человек и собака часто живут рядом, поэтому неудивительно, что у них много общих болезней, их существует около 80. К наиболее распространённым относятся гельминтозы.
Различные инфекционные заболевания, вызванные бактериями и вирусами, также бывают общими. Это, прежде всего, бешенство. Ветеринары лучше всех знают, что даже самой маленькой таксе, зараженной бешенством, достаточно сделать зубами маленькую царапину на коже человека, чтобы он погиб. Кроме бешенства бездомные животные могут заразить человека и некоторыми другими заболеваниями: туберкулёз, сибирская язва и др. Из грибковых заболеваний - стригущий лишай.
В последнее время проблеме бродячих животных, а точнее, их большого количества, уделяется много внимания. Основное ее решение - это уменьшение их численности. Государство борется с этой проблемой разными способами. Например, создает приюты для собак, питомники, где их кормят, лечат, помогают найти новых хозяев и т.д. Но чаще - это жестокие способы. В собак стреляют, травят и т.д.
И поэтому мы решили разработать проект, который поможет уменьшить количество бродячих собак на улицах и сделает это гуманным способом. А если быть точнее, то целью нашей работы стало создание действующей модели программируемого робота-помощника по отлову бродячих собак.
Задачи:
- изучить материал по проблеме;
- придумать модель действующего робота;
- сконструировать робота;
- создать программу для управления роботом;
- проверить собранную модель в действии.
Объект – большое количество бродячих собак на улицах населенных пунктов.
Предмет – действующая модель робота по отлову бродячих собак, как гуманный и инновационный способ уменьшения их численности на улицах.
Гипотеза: мы предполагаем, что создание действующей модели робота, поможет гуманным способом производить отлов бродячих собак и уменьшить их количество на улицах населенных пунктов.
Для того, чтобы решить поставленные задачи, мы будем использовать следующие методы:
- анализ литературы по теме исследования;
- анкетирование;
- эксперимент.
Наша работа носит прикладной характер, так как в основе проекта лежит практическое техническое решение социальной проблемы, которое может быть использовано для применения в реальной жизни.
В ходе изучения литературы по теме работы выяснилось, что о проблеме отлова бродячих собак очень много написано как в газетах, журналах, так и в сети Интернет. Например, А. Балаганов в своей статье «Устройство бездомных собак» пишет о том, что во многих странах Европы отказались от негуманных способов контроля численности бродячих собак, однако в России эти принципы еще далеко не развиты.
На сайте газеты «Московский комсомолец» мы познакомились с информацией о том, что при подготовке к Олимпиаде-2014 в Сочи массово уничтожали собак, а при подготовке к Чемпионату мира по футболу – 2018 объявлены конкурсы на выбор компаний по уничтожению бродячих животных. По мнению А.И. Рахманова, автора статьи «Проблемы отношения к бесхозным животным», в России должны быть придуманы гуманные способы контроля численности бродячих животных, потому что те способы, которые применяются сейчас, являются губительными как для собак, так и для человека.
Из этой информации мы смогли сделать вывод о том, что авторы источников пишут о том, что проблема требует решения каким-то другим, более гуманным способом.
Проведение анкетирования
После изучения литературы по нашей теме мы решили, что на начальном этапе проекта нам необходимо уточнить, насколько актуальна эта проблема в нашем городе. Мы разработали форму анкеты и провели анкетирование среди учащихся Центра детского творчества г. Поронайска.
Главное, что хотелось выяснить: насколько часто дети встречают бродячих собак на улице, как часто собаки проявляют агрессивность, и приходилось ли им когда-нибудь наблюдать за тем, как отлавливают бродячих собак. Было опрошено 142 учащихся. Когда мы (с помощью педагога) подвели итоги результатов анкетирования, то выяснилось, что более половины участников анкетирования встречают по несколько бродячих собак в день, большинство из опрошенных испытывают страх при виде бродячих собак, многим из них приходилось хотя бы раз сталкиваться с агрессией бродячих собак, и 35 ребят видели, как отлавливают собак. Уже в ходе беседы с анкетируемыми ребятами выяснилось, что подобные сцены вызывают негативное отношение, кто-то даже плакал, увидев такую сцену.
Тогда и возникла идея создания робота-помощника по отлову бродячих собак, который бы не причинял животным боли и страдания, и при этом сохранял им жизнь.
Идея модели робота
По нашей задумке, это должен быть полностью автоматизированный робот, который может работать без участия человека, желательно круглосуточно. Мы решили создать модель такого робота, используя те знания и навыки, которые мы получили на занятиях по робототехнике и применить для создания модели комплект конструктора LEGO Education WeDo 2.0.
Многим известен конструктор LEGO, как игрушка состоящая из деталей и кубиков разных размеров для сборки и моделирования разнообразных предметов, которая была изобретена в 1932 году в Дании. Наш конструктор отличается от всем известных наборов тем, что с его помощью можно не только создать определенную модель, но и запрограммировать ее на выполнение различных действий. Так мы и сделали. Но собрать подходящую для реализации проекта модель получилось не с первого раза.
Создание робота-помощника
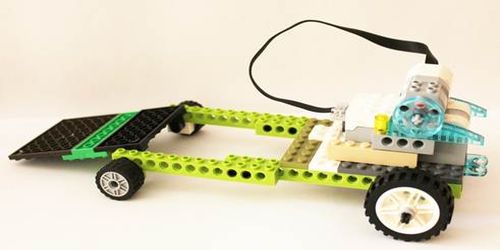
Так как робот, по нашей идее, должен будет перемещаться по улицам города и после отлова собаки доставлять ее в приют, то ему необходим механизм, отвечающий за движение, поэтому мы собрали платформу с колесами (рис.1)
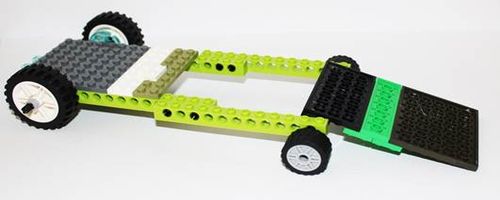
и установили на нее мотор (рис.2).
Затем мы собрали клетку, в которую должна будет забегать собака, учуяв запах приманки, находящейся в ней (рис.3).

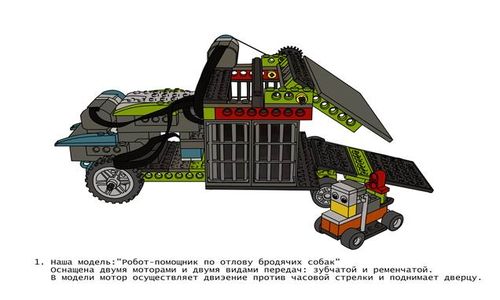
Соединив 2 части, получилась первоначальная модель робота (Рис.4).

Но, проведя тестирование модели, мы обнаружили, что клетка, снабженная открытой дверцей, не имеет механизма, позволяющего ее закрывать автоматически. То есть, бродячая собака, попав в клетку, может съесть приманку и свободно покинуть ее, что не приводит к достижению цели. Более того, сама конструкция оказалась недостаточно прочной, следовало перепроверить соединения некоторых деталей.
Для достижения цели автоматического закрытия дверцы клетки мы решили снабдить её:
- ременной передачей (по аналогии с такой, которые устанавливаются в современных автомобилях), которая состоит из двух колес и ремня (в нашем случае – резинки);
- зубчатой передачей, которая состоит из двух зубчатых колес;
- а также еще одним мотором, который будет управлять дверцей (рис.4).
Вместе они образуют крутящий механизм и опускают дверцу клетки в нужный момент времени,

Получили вторую модель робота, которую мы запрограммировали и снова провели тестирование (рис.5). После внесения изменений дверца клетки стала открываться и закрываться автоматически, но мы обратили внимание на то, что это происходит слишком быстро и собака не успеет оказаться внутри клетки.
Появилась идея добавить в строение клетки датчик расстояния. Этот датчик будет срабатывать, как только собака окажется внутри клетки, и моментально закрывать дверцу. Снова провели тестирование. Результат был достигнут – робот работал идеально (Рис.6).

Таким образом, мы можем сделать вывод, что создание действующей модели робота-помощника по отлову бродячих собак возможно. Экспериментальным путем доказано, что готовая модель достаточно проста как в устройстве, так и в управлении. Задача заключается лишь в выборе правильного алгоритма его программирования.
Заключение
Подводя итог нашей проектно-исследовательской работы можно сказать, что тема бродячих собак волнует как взрослых, так и детей. В своей работе мы разработали вариант решения проблемы отлова бродячих собак способом, который не принесет вреда ни животным, ни людям. Экспериментальным путем у нас получилось свою идею превратить в реальность. Таким образом, выдвинутая нами гипотеза – подтвердилась.
Работая над проектом, мы научились ставить цель, самостоятельно определять и решать задачи, научились соединять знания из разных направлений для выполнения поставленной цели, достигать нужного результата, используя такой метод исследования как эксперимент (собирать разные варианты соединения механизмов, программирования и т.д.).
Результаты нашей работы - модель робота по отлову бродячих собак, как мы думаем, может быть использована в реальной жизни и стать хорошим помощником человеку, заботящемуся как о своем благополучии, так и о благополучии животных. Но стоит отметить, что предмет нашей проектно-исследовательской работы - это только часть решения проблемы бродячих собак.
Возникает вопрос организации приюта для собак, куда робот будет транспортировать отловленных животных. К сожалению, этот вопрос еще не реализован в нашем городе. Поэтому в продолжение исследования мы хотели бы заняться изучением возможности организации подобного местонахождения отловленных животных.
Список литературы
- Альфред Б.В. Жизнь животных. - М.: Наука, 2013. – 276 c.
- Биологическая энциклопедия. – М.: Академия, 1992. - 487 с.
- Лиусс Т.В. Формирование навыков конструктивно – игровой деятельности у детей помощью LEGO. – М.: Издательство «ЛитРесс», 2015. – 142 с.
- Чаплин В.И. Наш друг-собака. – М.: Детская Литература, 2008. – 96 с.
- Балаганов А.А. Обустройство бродячих собак.// Ветеринарная патология. 2017. №8. С.7-12.
- Рахманов А. И. Проблема отношения к бесхозным животным. //Ветеринарная патология. 2001. №8. С. 2-4.
- Рахманов А.И. Проблема бродячих собак в городах. //Ветеринарная патология. 2002. №1. С. 17-19.
- Интернет – ресурсы.
Приложение. Принцип работы робота-помощника