Индивидуальный проект "Радиолокация в военном деле"

В процессе работы над индивидуальным проектом по физике "Радиолокация в военном деле" учеником 11 класса школы была поставлена и реализована цель, сделать обзор современных направлений и примеров использования геоинформационных технологий в военном деле, дать определение понятию "радиолокация" и определить ее виды.
Подробнее о проекте:
В ученической исследовательской работе по физике "Радиолокация в военном деле" автор выясняет, что как складывалась история применения радиолокации в военном деле в СССР, в Германии и в Великобритании. Автор подробно останавливается на описании методов радиолокации, оборудования и режима работы.
В готовом творческом и исследовательском проекте по физике "Радиолокация в военном деле" автор знакомит нас с современными направлениями и примерами использования радиолокационных системы в военном деле, знакомится с основными положениями роли радиолокации в построении радиолокационных систем радиотехнических войск, рассматривает влияние внешней среды на работу радиолокационной системы радиотехнических войск.
Оглавление
Введение
1. Принципы радиолокации.
2. История радиолокации.
3. Виды радиолокации.
4. Методы, оборудование, режимы работы.
5. Дальность действия радиолокации.
Заключение
Список источников и литературы
Приложение
Введение
Актуальность:Радиолокация имеет много предназначений, начиная от военной отрасли заканчивая медициной. С помощью радиолокационной системы можно наблюдать за любыми объектами, как на суше, так и в воздухе и на воде.
Цель проекта: обзор современных направлений и примеров использования геоинформационных технологий в военном деле.
Задачи:
- Познакомиться с современными направлениями и примерами использования радиолокационных системы в военном деле.
- Познакомиться с основными положениями роли радиолокации в построении радиолокационных систем радиотехнических войск.
- Рассмотреть вопрос взаимосвязи противникам силами и средствами войск обороны.
- Рассмотреть влияние внешней среды на работу радиолокационной системы радиотехнических войск.
Методы: сбор информации и ее анализ.
Гипотеза: Знание особенностей радиолокации и принципа работы локационной установки позволит понять физическую природу электромагнитных волн и их практическую направленность.
Принцип радиолокации
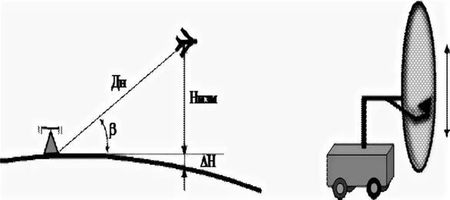
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах: В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. (Приложения №1)
Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель. На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой). На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
История радиолокации
Эффект отражения радиоволн от твердых тел впервые обнаружил немецкий физик Генрих Герц в 1886 году. Использовать эффект на практике мешало рассеивание радиоволн: на объект локации их попадало меньше одной миллиардной части. Лишь в 1930-х годах, в связи с развитием авиации, ведущие страны мира начали исследовать возможность применения радиолокации для целей противовоздушной обороны.
Идея радиолокации была известна задолго до Второй Мировой войны и трудно назвать того, кто первым высказал её. По данным германских историков, первым, кто (в 1902 году) создал и успешно испытал на судах, ходивших по Рейну, практически действующий образец того, что теперь называют «радиолокационная станция» (изобретатель называл её «телемобилоскоп»), был живший и работавший в Кёльне германский инженер Кристиан Хюльсмейер (встречается также написание и произношение Хюльсмайер).
В 1904 году он получил патент на «Способ сигнализации об отдалённых объектах при помощи электрических волн»[2]. Но в разных странах традиционно чтут разных изобретателей радиолокации. Вообще же — её идея долго (с момента обнаружения эффекта) не находила воплощения в практической деятельности. Первое практическое применение радиолокации было реализовано в 1932 году в СССР в установке "Рапид".(Приложение№2) Первые в мире РЛС, принятые на вооружение и выпускавшиеся серийно, были в СССР с 1939 года.
СССР
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом П. К. Ощепковым, получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя — М. Н. Тухачевского.
В 1932 году на базе Ленинградского физико-технического института был создан Ленинградский электрофизический институт (ЛЭФИ) под руководством А. А. Чернышёва, в котором проводились исследовательские и опытно-конструкторские работы по радиолокации. В 1935 году ЛЭФИ был расформирован, а на его базе организован «закрытый» институт НИИ-9 с оборонной тематикой, включавшей и радиолокацию. Научным руководителей его стал М. А. Бонч-Бруевич. Работы по радиолокации были начаты и в УФТИ в Харькове. К началу войны усилиями учёных и инженеров ЛЭФИ, НИИ-9 и других организаций были созданы опытные наземные радиолокационные станции.
3 января 1934 года в СССР был успешно проведён эксперимент по обнаружению самолёта радиолокационным методом. Самолёт, летящий на высоте 150 метров, был обнаружен на дальности 600 метров от радарной установки. Эксперимент был организован представителями Ленинградского института электротехники и Центральной радиолаборатории. В 1934 году маршал Тухачевский в письме правительству СССР написал: «Опыты по обнаружению самолётов с помощью электромагнитного луча подтвердили правильность положенного в основу принципа». Первая опытная установка «Рапид» была опробована в том же году.
Передатчик был установлен на крыше дома № 14 по Красноказарменной улице, Москва, приёмник — в районе посёлка Новогиреево; присутствовали М. Н. Тухачевский, Н. Н. Нагорный, М. В. Шулейкин. Аппаратуру демонстрировал П. К. Ощепков. В 1936 году советская сантиметровая радиолокационная станция «Буря» засекала самолёт с расстояния 10 километров. Первые РЛС в СССР, принятые на вооружение РККА и выпускавшиеся серийно, были: РУС-1 — с 1939 года и РУС-2 — с 1940 года.
4 июля 1943 года в соответствии с Постановлением ГКО от № 3686сс «О радиолокации» был сформирован Совет по радиолокации при ГКО. Его инициаторами стали военный инженер М. М. Лобанов и учёный А. И. Берг.
Великобритания
Советник премьер-министра Черчилля по науке, профессор Ф. А. Линдеманн, отозвался о разработке радиолокационного бомбардировочного прицела H2S коротко: «Это дешевка». Между тем H2S дал британским бомбардировочным силам не только прицел для бомбометания при ограниченной видимости, но и навигационное средство[4].
Установка радиолокационных взрывателей в снаряды снизила на порядок расход количества снарядов, необходимых для того, чтобы сбить один самолёт-снаряд «Фау-1» и интенсивность таких налетов значительно снизилась. К началу Второй Мировой Войны в Великобритании была развернута система радиолокационных станций Chain Home.(Приложение№3) История создания радиолокационных станций показана в британском документальном фильме The Secret War: "To See A Hundred Miles".
Германия
Для защиты городов от налетов бомбардировщиков немцы использовали зенитные батареи, управляемые станциями орудийной наводки (СОН) типа «Вюрцбург». Разведка союзников установила, что несущая частота этих станций равна 560 мегагерцам. Летом 1943 года бомбардировщики 8-ой американской воздушной армии были оснащены передатчиками типа «Карпет». Передатчики излучали помеху — спектр частот при средней частоте 560 мегагерц. В октябре 1943 года подвели первый итог: самолетов с «Карпетом» было сбито в два раза меньше, чем без него.
Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
Пассивная радиолокация исследует собственное излучение (тепловое, электромагнитное и т.п.), которое генерирует цели (ракеты, самолеты, космические объекты).
Приём пассивной РЛС радиоволн, излучаемых земной и водной поверхностями, используется для снятия радиолокационной карты местности в навигационных целях или обзора местности с целью её разведки, а также для обнаружения отдельных объектов с интенсивным радиоизлучением.
Такая РЛС имеетрадиоприёмник и антенну с узкой, иглообразной диаграммой направленности, сканирующей в заданномсекторе. Принятые сигналы после обработки в приёмнике поступают на электроннолучевой индикатор, укоторого развёртка изображения синхронизирована с перемещением диаграммы направленности антенны. Наэкране индикатора получают картину теплового радиоизлучения местности. (Приложение №4,5)
Активная с активным ответом осуществляется в случае, если объект оборудован собственным передатчиком и взаимодействие с ним происходит по алгоритму "запрос - ответ". (Приложение №5)
Активная с пассивным ответом предполагает исследование вторичного (отраженного) радиосигнала. Радиолокационная станция в этом случае состоит из передатчика и приемника. (Приложение №5)
Полуактивная радиолокация - это частный случай активной, в случае когда приемник отраженного излучения расположен вне РЛС (например, является конструктивным элементом самонаводящейся ракеты).
Методы, оборудование, режимы работы РЛС
Первичный радиолокатор
Первичный (с пассивным ответом) радиолокатор, в основном, служит для обнаружения целей, облучая их электромагнитной волной и затем принимая отражения (эхо) от цели. Поскольку скорость электромагнитных волн постоянна (скорость света), становится возможным определить расстояние до цели, основываясь на измерении различных параметров при распространении сигнала.
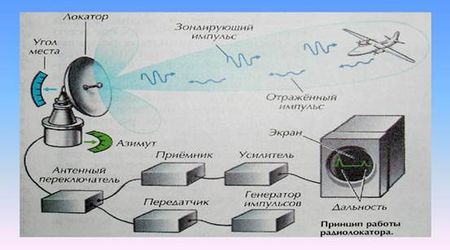
В основе устройства радиолокационной станции лежат три компонента: передатчик, антенна и приёмник.
Передатчик (передающее устройство) является источником электромагнитного сигнала. Он может представлять собой мощный импульсный генератор. Для импульсных РЛС сантиметрового диапазона — обычно магнетрон или импульсный генератор, работающий по схеме: задающий генератор — мощный усилитель, использующий в качестве генератора чаще всего лампу бегущей волны (ЛБВ), а для РЛС метрового диапазона часто используют триодную лампу.
РЛС, которые используют магнетроны, некогерентны или псевдо-когерентны, в отличие от РЛС на основе ЛБВ. В зависимости от способа измерения дальности, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
Антенна выполняет излучение сигнала передатчика в заданном направлении и приём отражённого от цели сигнала. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающей. В случае, если передача и приём совмещены в одной антенне, эти два действия выполняются поочерёдно, а чтобы мощный сигнал передатчика не просачивался в приёмник, перед приёмником размещают специальное устройство, закрывающее вход приёмника в момент излучения зондирующего сигнала.
Приёмник (приёмное устройство) выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на лучевую трубку (экран), которая показывает изображение, синхронизированное с движением антенны.
Различные РЛС первичного типа основаны на различных методах измерения параметров отражённого сигнала:
Частотный метод
Частотный метод измерения дальности основан на использовании частотной модуляции излучаемых непрерывных сигналов. В классической реализации данного метода (ЛЧМ) за полупериод частота меняется по линейному закону от f1 до f2. Из-за запаздывания при распространении сигнала разница частот излучаемого и принимаемого сигналов прямо пропорциональна времени распространения. Измеряя ее и зная параметры излучаемого сигнала, можно определить дальность до цели.
Достоинства:
- позволяет измерять очень малые дальности;
- используется маломощный передатчик.
Недостатки:
- необходимо использование двух антенн;
- ухудшение чувствительности приёмника вследствие просачивания через антенну в приемный тракт излучения передатчика, подверженного случайным изменениям;
- высокие требования к линейности изменения частоты.
Фазовый метод
Фазовый (когерентный) метод радиолокации основан на выделении и анализе разности фаз отправленного и отражённого сигналов, которая возникает из-за эффекта Доплера, когда сигнал отражается от движущегося объекта. При этом передающее устройство может работать как непрерывно, так и в импульсном режиме. Основным преимуществом данного метода является то, что он «позволяет наблюдать только движущиеся объекты, а это исключает помехи от неподвижных предметов, расположенных между приёмной аппаратурой и целью или за ней»[12].
Так как при этом используются ультракороткие волны, то однозначный диапазон измерения дальности составляет порядка единиц метра. Поэтому на практике используют более сложные схемы, в которых присутствует две и больше частот.
Достоинства:
- маломощное излучение, так как генерируются незатухающие колебания;
- точность не зависит от доплеровского сдвига частоты отражения;
- достаточно простое устройство.
Недостатки:
- отсутствие разрешения по дальности;
- ухудшение чувствительности приёмника вследствие проникновения через антенну в приёмный тракт излучения передатчика, подверженного случайным изменениям.
Импульсный метод
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт излучающий сигнал только в течение очень краткого времени, коротким импульсом (обычно приблизительно микросекунда), после чего переходит в режим приёма и слушает эхо, отражённое от цели, в то время как излучённый импульс распространяется в пространстве.
Поскольку импульс уходит далеко от радара с постоянной скоростью, между временем, прошедшим с момента посылки импульса до момента получения эхо-ответа, и расстоянием до цели — прямая зависимость. Следующий импульс можно послать только через некоторое время, а именно после того, как импульс придёт обратно (это зависит от дальности обнаружения радара, мощности передатчика, усиления антенны, чувствительности приёмника).
Если импульс посылать раньше, то эхо предыдущего импульса от отдалённой цели может быть спутано с эхом второго импульса от близкой цели. Промежуток времени между импульсами называют интервалом повторения импульса обратная к нему величина — важный параметр, который называют частотой повторения импульса . Радары низкой частоты дальнего обзора обычно имеют интервал повторения в несколько сотен импульсов в секунду. Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
Достоинства импульсного метода измерения дальности:
- возможность построения РЛС с одной антенной;
- простота индикаторного устройства;
- удобство измерения дальности нескольких целей;
- простота излучаемых импульсов, длящихся очень малое время, и принимаемых сигналов.
Недостатки:
- необходимость использования больших импульсных мощностей передатчика;
- невозможность измерения малых дальностей;
- большая мёртвая зона.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток. За один оборот антенны РЛС генерируется 4096 малых азимутальных меток (для старых систем) или 16384 улучшенных малых азимутальных меток (англ. ImprovedAzimuthChangepulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц.
Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С. Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта малых азимутальных меток.
Дальность определяется по задержке пришедшего ответа. Если воздушное судно находится в зоне действия боковых лепестков, а не основного луча, или находится сзади антенны, то ответчик воздушного судна при получении запроса от РЛС получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. В этом случае ответчик запирается и не отвечает на запрос.
Принятый от ответчика сигнал обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов и выдачу информации конечному потребителю и (или) на контрольный индикатор.
Плюсы вторичной РЛС:
- более высокая точность;
- дополнительная информация о воздушном судне (номер борта, высота);
- малая по сравнению с первичными РЛС мощность излучения;
- большая дальность обнаружения.
Режим работы
Существует два основных режима функционирования радиолокационных станций и устройств. Первый - сканирование пространства. Он осуществляется по строго заданной системе. При последовательном обзоре перемещение луча радара может носить круговой, спиральный, конический, секторный характер. Например, решетка антенны может медленно поворачиваться по кругу (по азимуту), одновременно сканируя по углу места (наклоняясь вверх и вниз). При параллельном сканировании обзор осуществляется пучком радиолокационных лучей. Каждому соответствует свой приемник, ведется обработка сразу нескольких информационных потоков.
Режим слежения подразумевает постоянную направленность антенны на выбранный объект. Для ее поворота, согласно с траекторией движущейся цели, используются специальные автоматизированные следящие системы.
Дальность действия РЛС
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, мощности излучаемого сигнала, и чувствительности приёмника системы. В общем случае без учёта потерь мощности в атмосфере, помех и шумов.
Влияние помех:
Работа нескольких РЛС в одном частотном диапазоне На загруженных участках, где одновременно используются многочисленные РЛС (например, морские порты) вероятны совпадения частотных диапазонов. Это приводит к приему РЛС сигнала другой РЛС. В результате на экране появляются дополнительные точки, бросающиеся в глаза из-за своей геометрической правильности. Эффект может быть убран переходом на другую рабочую частоту. Мнимое изображение При отражении радиосигнала от массивного объекта возможно дальнейшее распространение к меньшим объектам с последующим отражением и попаданием в РЛС.
Таким образом, путь, который прошел сигнал становится больше и на экране появляется мнимое изображение объекта, который на самом деле находится в другом месте. Такой эффект должен приниматься во внимание при нахождении вблизи крупных отражающих объектов, таких как мосты, гидротехнические сооружения и крупные суда. Многократное отражение
При размещении РЛС на большом судне возможен эффект многократного отражения сигнала. Сигнал РЛС отражается от близкого объекта, частично попадает обратно в РЛС, а частично отражается от корпуса суда.
Таких отражений может быть много, амплитуда при каждом отражении уменьшается и сигнал будет восприниматься до тех пор, пока не будет достигнута пороговая чувствительность приемника. На экране радара будут видны несколько уменьшающихся с каждым разом объектов. Расстояние между ними пропорционально расстоянию от РЛС до объекта.
Влияние шумов: Влияние атмосферы
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды. Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
Заключение
Появлением радиолокации можно считать рубеж 19-20 вв. И по сути, этой области наук чуть больше века, но столь стремительное ее развитие привело нас к тому, что мы уже не можем даже и представить свое существование без нее в военном значении.
С развитием общества, человеческие потребности растут все больше. Следовательно, перед радиолокацией появляются новые задачи и новые направления, а значит и усовершенствование методов, оборудования системы радиолокации. Нескоро для ученых и изобретателей к данной области будет потерян интерес, который подогревается и научным прогрессом, с одной стороны, и коммерческой заинтересованностью, с другой.
Создание совершенной РЛС - сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики. По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации. Таким образом, несмотря на то, что на сегодняшний день радиолокация нашла свое широкое применения в военном деле, создание самых современных РЛС требует самого высокого уровня развития науки, технологии и организации, поэтому разработка и сооружение каждой такой РЛС является значительным научно-техническим достижением не только отечественного, но и мирового масштаба.
Список литературы
- Современная радиолокация. Анализ, расчет и проектирование. Под редакцией Кобзарева Ю.В., М., Сов.радио, 1969г.-704стр.
- Дулевич В.Е. Теоретические основы радиолокации. М., Сов.радио, 1978г.
- Ширман Я.Д. Теоретические основы радиолокации. М., Сов.радио, 1970г.
- Ю.Б. Кобзарев Первые шаги советской радиолокации Журнал Природа, Декабрь 1985 год
- Интернет-энциклопедия. Википедия.
- 7. Журнал «НАУКА И ЖИЗНЬ» №5, 2009г.
- Сайт «радиолокация».
- Сайт «блог о технике».
- Журнал «Национальная безопасность» №7, 2008г.
Приложение №1
Приложение №2

Приложение №3

Приложение №4
Приложение №5
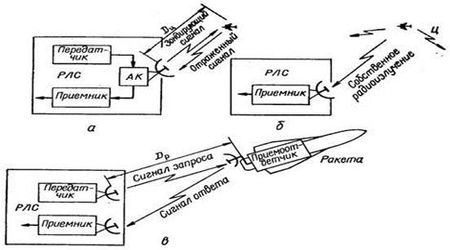
Виды радиолокации: а – активная с пассивным ответом; б– пассивная; в– активная с активным ответом.
Приложение №6