Индивидуальный проект "Роботы-ЭКО"
Индивидуальный исследовательский проект по робототехнике "Роботы-ЭКО" содержит описание хода работы для реализации поставленной цели создать роботов, помогающих в уборке мусора. В проекте авторы проводят исследование отвечают на вопрос: зачем нужны роботы в быту и домашнем хозяйстве?
Подробнее о проекте:
Тема ученической работы о роботах в сельскохозяйственной технике, выбранная автором проекта, очень актуальна, так как аваторы предполагают, что мы предполагаем, что если разработанные ими модели роботов взять за основу, то в промышленных масштабах они могли бы пригодиться в спасении экологии нашей планеты. В творческом проекте собираются модели робота-уборщика и проводится его исследование, по выявлению недостатков в работе и их усовершенствования.
Готовая творческая работа по робототехнике на тему "Роботы-ЭКО" будет интересна для учеников школы, увлекающихся робототехникой и программированием, поможет выявить у них интерес к роботостроению, программированию и конструированию. В исследовательском проекте рассматриваются виды и типы роботов или робототехники для выполнения работ по уборке мусора, оценивается помощь, оказываемая такой техникой для улучшения экологии планеты.
Оглавление
Введение
1. История робототехники.
2. Исследование эко-роботов.
3. Техника безопасности при роботостроении.
Заключение
Использованная литература
Введение
Когда мы думали над темой проекта, возникло много интересных идей в разных сферах нашей жизни. Но мы выбрали то, что сегодня наиболее актуально – это проблема уборки и утилизации отходов жизнедеятельности людей. Мы считаем, что роботы могут существенно помочь людям в уборке и сортировке мусора.
Сегодня в этой сфере используется спецтранспорт, работающий на горючем топливе, загрязняющий окружающую среду. Надеемся, что в ближайшем будущем эта ситуация изменится. Поэтому мы решили внести свой вклад - создать роботов–уборщиков, не выделяющих вредных веществ в окружающую среду.
Цель работы: Создать роботов, помогающих в уборке мусора.
Для достижения поставленной цели нам необходимо решить следующие задачи:
- Составить план работы над проектом;
- Сконструировать и запрограммировать роботов, используя конструктор (Mindstorms EV3);
- Представить результат своей работы.
Гипотеза: мы предполагаем, что если наши модели роботов взять за основу, то в промышленных масштабах они могли бы пригодиться в спасении экологии нашей планеты.
История робототехники
История серьезной робототехники начинается с появления атомной промышленности почти сразу по окончании Второй мировой войны. Поставленная задача — обезопасить работу персонала с радиоактивными препаратами — успешно решается при помощи манипуляторов, копирующих движения человека-оператора. Это еще не совсем полноценные роботы, поскольку они по-прежнему состоят только из механических деталей: используются ременные и шевронныепередачи.
Современное название таких устройств — копирующие манипуляторы или MSM (master-slave manipulators).Одна из первых компаний по производству MSM — «CRL» (Central Research Laboratories) — была основана в 1945 году, а первый ее MSM — «Model 1» — был представлен комиссии по атомной энергетике США уже в 1949 году.
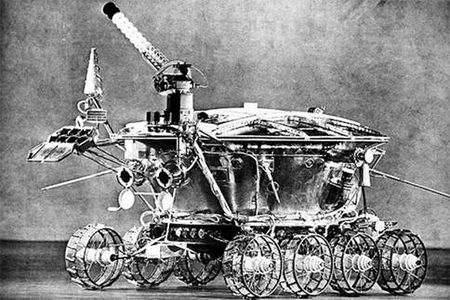
Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно считать 18 мая 1966 года. В этот день Григорий Николаевич Бабакин, главный конструктормашиностроительного завода имени Семена Алексеевича Лавочкина в Химках подписал головной том аванпроекта E8. Это был «Луноход-1», луноход 8ЕЛ в составе автоматической станции E8 №203, — первый в истории аппарат, успешно покоривший лунную поверхность 17 ноября 1970 года.
Исследования устойчивости привели к работам над динамическим равновесием роботов, в результате чего получились роботы-лошади и даже несколько роботов на одной ноге, — чтобы не упасть, им приходится постоянно бегать и подпрыгивать. Начинается эра исследования устойчивости и проходимости. Сегодня появляется множество роботов для исследования других планет и, конечно, ведения боевых действий в пустыне.
Первое место в мире по производству и использованию роботов занимает Япония. В 1928 году под руководством доктора Нисимуро Макото был создан робот, названный «Естествоиспытатель», высотой 3,2 метра. Оснащенный моторчиками, он мог менять положение головы и рук. А 21 ноября 2000 года на первой в истории выставке ROBODEX в городе Йокохама, Япония, был представлен первый человекоподобный робот «SDR-3X».
Исследование эко-роботов
Исследование №1
Конструкция (шины\колеса)
В модели №1 мы подбирали способы перемещения конструкции (шины\колеса). Изначально, когда мы установили шины, модель практически не могла делать повороты, поэтому нам пришлось внести изменения и установить гусеницы. Это дало возможность устройству поворачиваться на месте, что очень важно.
Исследование №2
Установка действующих механизмов
В ходе сборки модели очень много времени ушло на установку среднего двигателя и подбор зубчатых колес для чистящего валика, так как не все зубчатые колеса подходили по размеру. Пришлось перебрать разные варианты диаметров зубчатых колес. Мы пытались даже установить червячную передачу энергии движения, но так как у данной передачи очень низкая скорость, мы решили отказаться от этой идеи (рис.1, 2 и фото).
Также пришлось перебрать разные варианты установки кузова. Нужно было его собрать и установить так, чтобы при движении робота кузов плавно опускался вниз и плавно поднимался вверх.
Исследование №3
Хвательный механизм
У модели №2 нам пришлось несколько раз перебирать хватательный механизм, в связи с тем, что робот не всегда схватывал банки.
Исследование №4
Работа с датчиками
Также мы проводили испытания на реакцию робота, вызванную получением данных с датчиков цвета и ультразвукового датчика и вычисляли направления дальнейшего движения робота с помощью данных датчиков (рис.3, 4).
Исследование №5
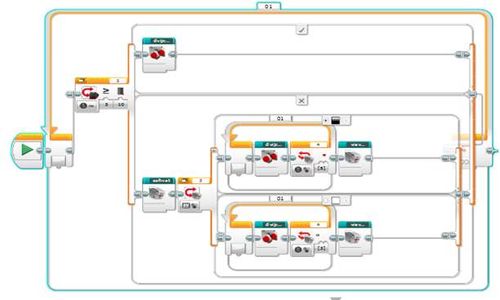
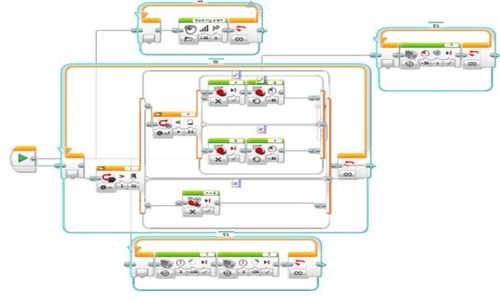
Работа с программным обеспечением
Для того чтобы наши модели работали по заданному маршруту, нам пришлось перебрать множество вариантов программирования. Модель №1 должна собирать и сортировать банки по цветам, а модель №2 должна чистить тротуар и посыпать его песком.
Исследование №6
Аккумулятор или бензин, как источник питания?
Исследуя разные источники в интернете, мы нашли немало причин загрязнения воздуха. Одна из главных причин чрезмерного загрязнения выхлопными газами - это крайне низкое качество автомобильного топлива. Одним из наиболее токсичных веществ, загрязняющих атмосферу, является оксид углерода СО2, который активно взаимодействует с гемоглобином крови и уже при очень низкой концентрации снижает её способность переносить кислород.
Содержание СО2 в воздухе уже около 0,01% вызывает головную боль, снижение умственной деятельности и расстройства ряда физиологических функций организма. Питанием для наших моделей являются аккумуляторы, которые не выделяют вредных веществ в окружающую среду, а при дополнительной установке на модели солнечных батарей, запас электроэнергии моделей будет увеличен.
Техника безопасности при роботостроении
1. Запрещается использование инструментов и предметов, правила обращения, с которыми не изучены.
2. При работе с конструктором важно следить за деталями, так как они очень мелкие. Запрещается брать детали в рот или раскидывать на рабочем столе.
3. При работе инструменты и детали держат так, как указанно в инструкции.
4. Детали конструктора и оборудование нужно хранить в предназначенном для этого месте. Запрещается хранить инструменты навалом.
5. Содержи в чистоте и порядке рабочее место.
6. Раскладывай оборудование в указанном порядке.
7. Выполняй работу внимательно, не отвлекайся посторонними делами.
8. При работе с компьютером нельзя открывать программы, включать, выключать компьютер без разрешения руководителя занятия.
9. Во время работы за компьютером нужно сидеть прямо напротив экрана, чтобы верхняя часть экрана находилась на уровне глаз на расстоянии 45-60 см.
10. При работе с компьютерами надо быть очень осторожными, чтобы не повредить монитор, при подключении конструкции, соблюдать порядок подключения.
11. После окончания сборки, проверки на компьютере, конструкция разбирается, детали укладываются в коробку, компьютер выключается и сдается руководителю занятия.
Заключение
Мы получили большое удовольствие от выполнения этой работы и узнали много нового в ходе конструирования наших роботов. Познакомились с историей появления первых роботов, провели ряд исследований. Мы считаем, что собранные нами модели в дальнейшем принесут пользу по благоустройству и экологическому благополучию нашего родного города, края и страны.
Так как если нашу модель роботов взять за основу, то в промышленных масштабах она могла бы пригодиться в спасении экологии нашей планеты за счет того, что данные модели не выделяют вредных веществ в атмосферу. Конечно, мы не первые, кто поднимает и изучает тему утилизации отходов, но все-таки мы думаем и изобретаем!
Для написания данной работы были использованы ресурсы Сети Интернет